4軸独立制御
4軸独立制御を行うことにより、偏心荷重に強い高精度な平行加圧が可能です。また、ボールねじ直動駆動方式により、ストローク中のどの位置での最大パワーを発生させることが可能です。


受付時間(平日)
9:00~17:00

4軸独立制御を行うことにより、偏心荷重に強い高精度な平行加圧が可能です。また、ボールねじ直動駆動方式により、ストローク中のどの位置での最大パワーを発生させることが可能です。
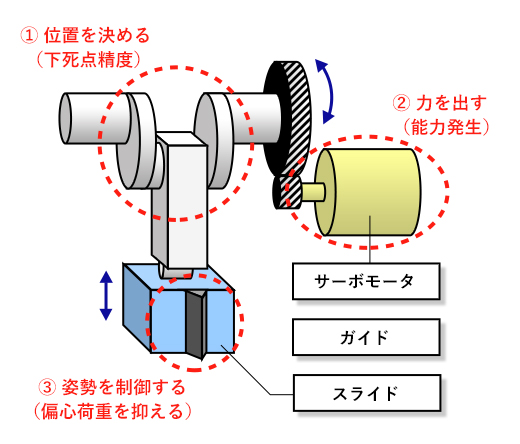
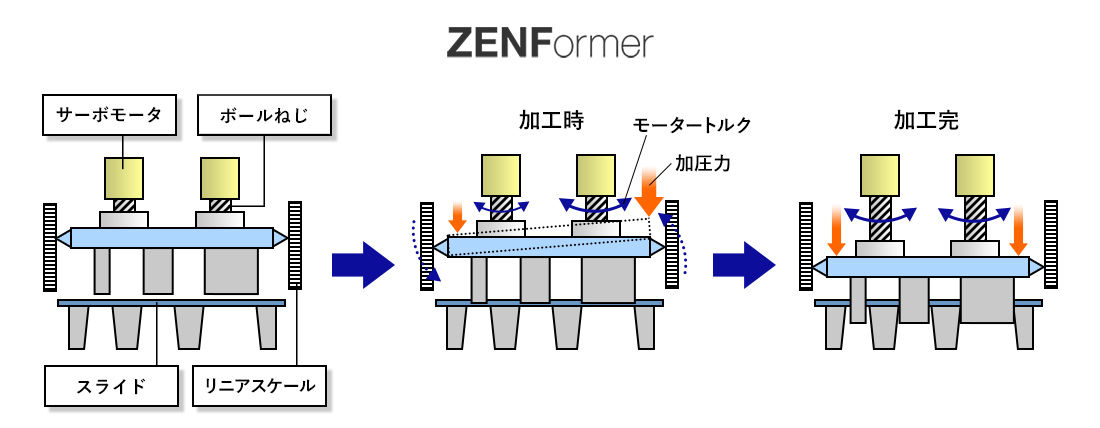
![]() は、下死点位置決め、加圧力発生、姿勢制御、それら全てをサーボモータの制御で行っている点が、一般のサーボプレスと大きく異なる点です。
は、下死点位置決め、加圧力発生、姿勢制御、それら全てをサーボモータの制御で行っている点が、一般のサーボプレスと大きく異なる点です。

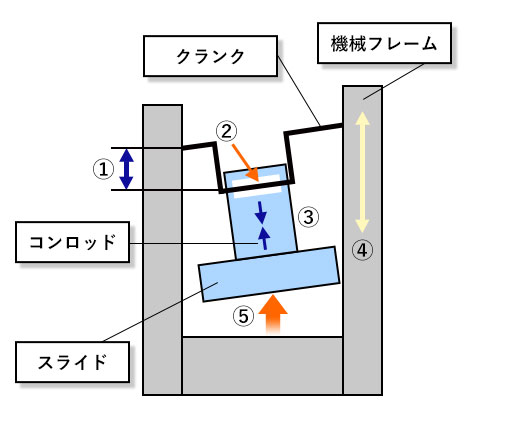
一般のクランクプレスは、5 つの機械的要因によって下死点の誤差が積算されます。
① クランクの偏心量
② 駆動部の隙間
③ コンロッドの圧縮量
④ 機械フレームの伸び量
⑤ 偏心荷重によるスライドの傾き量
![]() は4軸独立平行制御を実現することで、外的要因に拠らず、ベッドからスライド間の距離を、常に平行に維持します。
は4軸独立平行制御を実現することで、外的要因に拠らず、ベッドからスライド間の距離を、常に平行に維持します。
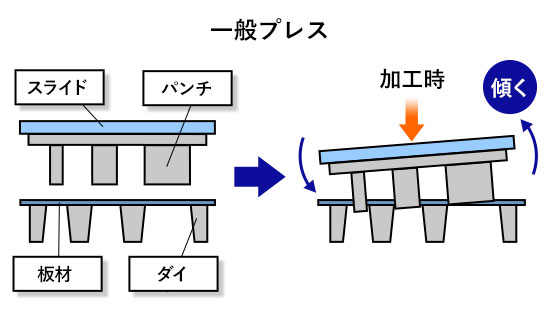
パンチ等のレイアウトが非対称な金型で加圧すると、アンバランスな荷重(偏荷重)が発生し、これによりスライドが傾きます。スライドが傾いたまま加工を行うと、製品寸法精度やパンチ等の金型の寿命にも大きな影響を及ぼします。
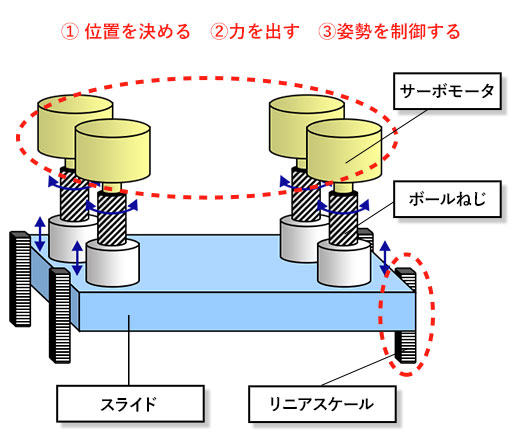
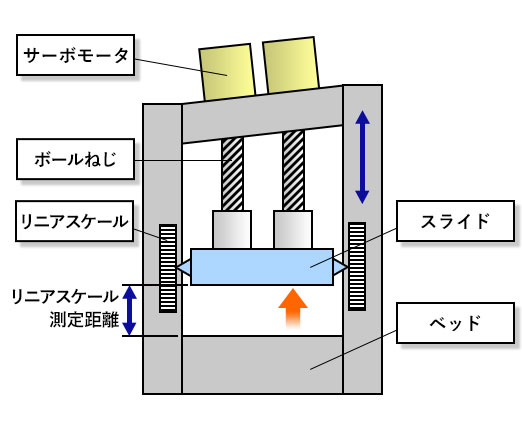
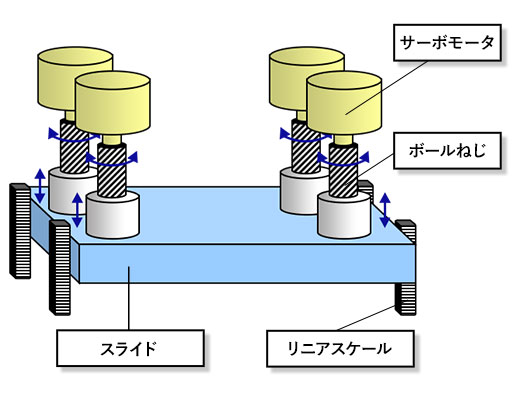
![]() は、一枚のスライドの4隅に配置されたサーボモータとボールねじで直動式に駆動する機構で各軸が独立して動作する4軸直動式構造となっており、高分解能な位置検出器(リニアスケール)の組合わせで、フルクローズド・フィードバック制御により、スライドを高精度に、かつ、完全デジタルコントロールにより、常にスライドの平行維持が可能となります。
は、一枚のスライドの4隅に配置されたサーボモータとボールねじで直動式に駆動する機構で各軸が独立して動作する4軸直動式構造となっており、高分解能な位置検出器(リニアスケール)の組合わせで、フルクローズド・フィードバック制御により、スライドを高精度に、かつ、完全デジタルコントロールにより、常にスライドの平行維持が可能となります。
一般のクランクプレスは 5 つの機械的要因によって下死点の誤差が決定されます。
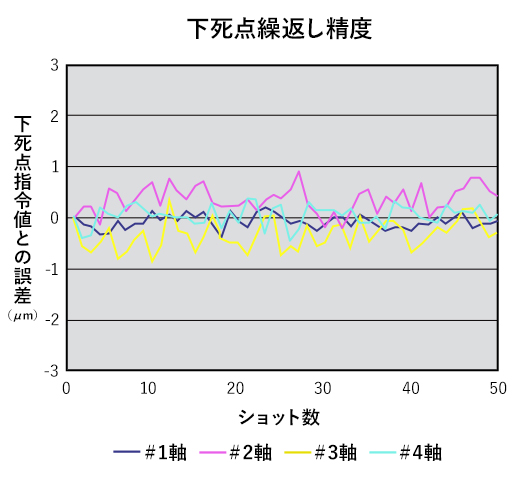
下記グラフはプレスのショット数における下死点位置のばらつきを 4 点について示したものです。![]() の下死点位置のばらつきは、常に ±1μm 以内に収まっています。
の下死点位置のばらつきは、常に ±1μm 以内に収まっています。
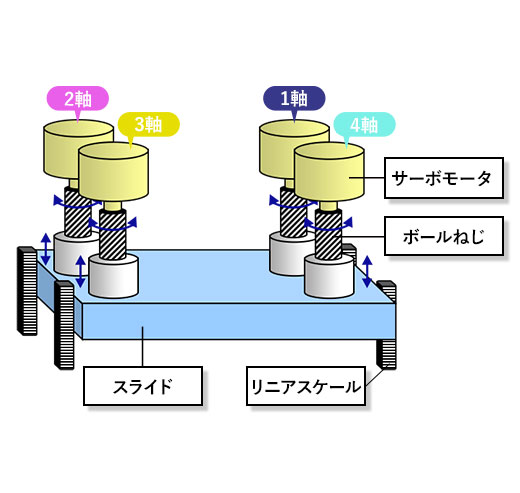
![]() は1基のサーボモータと1体のボールねじが連結されており、これがスライドの 4隅に設置された、4軸独立平行制御方式を採用しております。
は1基のサーボモータと1体のボールねじが連結されており、これがスライドの 4隅に設置された、4軸独立平行制御方式を採用しております。
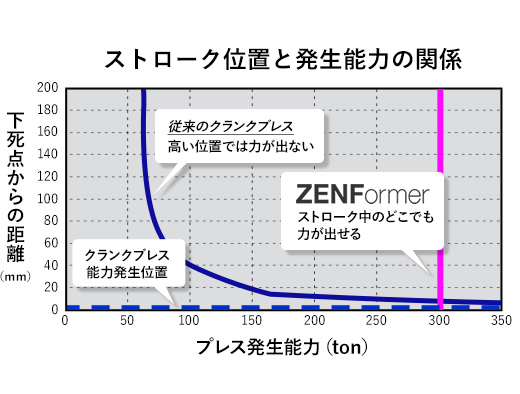
上図はスライド位置に対する加圧力の関係を示したグラフです。従来のクランクプレスでは下死点付近でしか最大能力を発生できないのに対し、![]() はストローク中のどの位置でも最大パワーを発生することができます。
はストローク中のどの位置でも最大パワーを発生することができます。